[서울=월드투데이]최용환 기자= 서울대학교 기계공학부 박용래 교수팀이 인공근육 형태의 초소형 유연 구동기를 개발하는데 성공해, 최소 침습 심장 수술 중 하나인 카테터 절제술이 더 안전하고 정말해질 수 있을 것으로 기대된다.
카테터 절제술은 심장의 부정맥 치료를 위한 시술의 한 방법이다. 가는 관인 카테터를 대퇴부 혈관을 통해 심장까지 삽입해 RF에너지를 발생시켜 심장 내 빈맥 발생 부위를 차단한다. 전 세계적으로 많이 시행되는 시술이지만, 시술 시 절제 부위에 너무 약한 힘을 가하면 시술 시간이 길어지며 인접 정상 조직에 영향을 줄 수 있고, 너무 강한 힘을 가하면 심장에 천공이 생길 위험이 존재하는 세심한 조절이 필요한 시술이다.
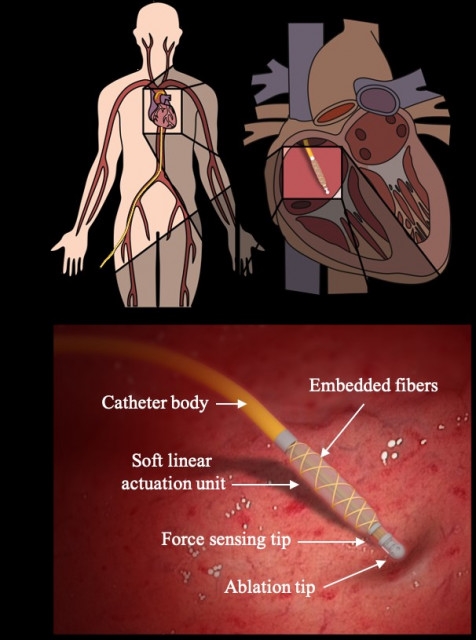
박용래 교수팀은 이러한 문제를 해결하고자 카테터 끝단에 장착할 수 있는 초소형 유연 구동기를 개발했다. 이 구동기는 지름 1.3~1.8mm, 길이 15mm의 매우 작은 크기이며, 근육처럼 쉽게 길이를 변화시킬 수 있는 유연한 구조다. 카테터 관을 타고 들어오는 식염수의 수압을 조절해 그 길이를 늘였다 줄였다 하는 조작으로 심장 벽의 접촉 부위에 가하는 힘을 미세하게 조절가능하다.
또한 카테터 끝단이 심장 벽에 가하는 접촉 힘을 감지할 수 있는 유연 촉각 센서를 구동기 끝에 내장하여 접촉 힘을 실시간으로 측정할 수 있을 뿐만 아니라 자동 제어도 가능하다. 아직은 시험 단계에 있지만 이러한 기술이 적용되면 미래에는 훨씬 더 안전하고 정밀하게 신체의 다양한 부위에 최소 침습 수술이 행해질 것으로 기대된다.
박용래 교수는 “이번 연구 결과는 유연 구조를 가지면서도 쉽게 움직임을 만들어낼 수 있는 소프트 로봇 기술을 매우 작은 크기로 구현했기 때문에 가능했다. 앞으로는 정확도와 구동 속도를 향상시키는 데 노력할 계획”이라고 전했다.
미국 카네기멜론 대학교(Carnegie Mellon University) 및 피츠버그 의대(University of Pittsburgh Medical Center)와 공동 연구로 이루어진 박용래 교수팀의 연구 결과는 소프트 로봇 분야 국제 학술지인 ‘소프트 로보틱스’(Soft Robotics) 10월호 표지 논문으로 선정됐다.